
Report to the Cabal: Part 10
Outfitting the Sub-driver
The objective here is to install, set-up, and test for correct operation all the devices and mechanisms needed to get the Sub-driver (SD) operational.
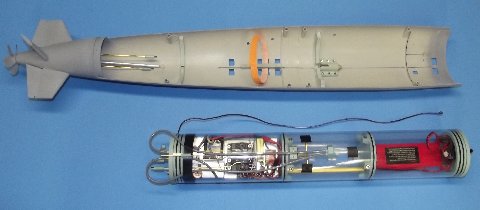
Completed Sub-driver example with lower hull
The end-game: an outfitted 3.5 SKIPJACK Sub-driver, ready for installation within the lower hull of either the 1/72 Scale Shipyard or Moebius SKIPJACK class model submarine. An indexing hole, drilled into the bottom of the ballast tank, fits the pin of the shock-absorber. A single Velcro strap holds the SD in place as the intermediate drive shaft is made up to the motor shaft coupler, and the three external control surface push-rod magnetic couplers engage their counterparts off the motor bulkhead. All that remains is to make up the snorkel assembly flexible hose from under the sail to the four-point manifold atop the SD, turn on the transmitter and SD’s mission-switch, make up the upper hull to the lower hull, check that the sail plane push-rod magnetic coupler engaged, and you’re ready to make the pool or lake safe for Democracy.
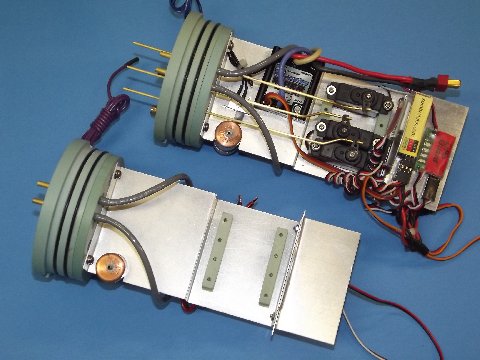
Top of unit tray; as received (bottom) and final fit (top)
Looking down onto the top of the motor-bulkhead mounted aluminum device tray. An outfitted unit above, below the assembly as it arrives to the customer – only the SAS components provided, made-up, and tested, the other devices are purchased separately, installed and set-up by the customer.

Bottom of unit tray; again, as received (bottom) and final fit (top)
Looking at the bottom of the device tray. An outfitted tray above. And below, the tray as delivered.
Don’t mount the mini-sized servos till all other devices are made up to the device tray and bulkhead. Note that I’ve ‘pig-tailed’ the leads from the devices – this goes a long way in minimizing the ‘spaghetti’ look of the outfitted SD once everything has been plugged in.
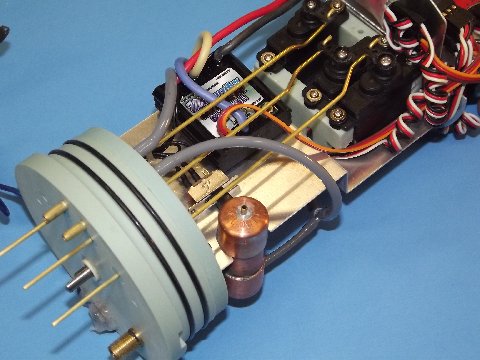
 Looking forward you can see the ADF taped to the forward face of the aluminum device bulkhead. Next to the motor-bulkhead is the copper SAS safety float-valve, the internal induction flexible hose to starboard, the internal discharge flexible hose to port.
Looking forward you can see the ADF taped to the forward face of the aluminum device bulkhead. Next to the motor-bulkhead is the copper SAS safety float-valve, the internal induction flexible hose to starboard, the internal discharge flexible hose to port.
All devices, other than the three mini-servos, are secured to the aluminum device tray and aluminum device bulkhead with double-sided mounting tape.
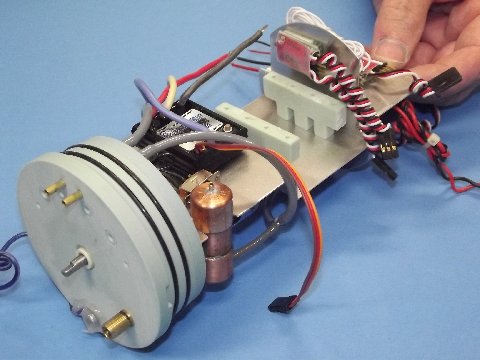
Forward end of the unit
What I’m showing here is the recommend position and orientation of the devices – you may mount them any which-way you want. The soldering needed is to make up the four devices to the common plug that makes up to the battery power cable. Also, you’ll solder the ESC output wires to the motor poles (the provided motor comes outfitted with internal spark-suppression capacitors. When soldering electrical and electronic components, always use a non-acid type flux to clean and ‘wet’ the parts being joined.
 The four devices that have to make up to the power cable are gathered together and wired in parallel to the Dean’s type
The four devices that have to make up to the power cable are gathered together and wired in parallel to the Dean’s type
plug. This half of the plug-connector makes up to the plug at the after end of the battery power cable running into the after dry space from the ballast tank conduit tube. Note how the plug nests up tight to the cut-out provided in the device bulkhead – easy to get at, but gets out of the way when the bulkhead is slid into the Lexan cylinder.
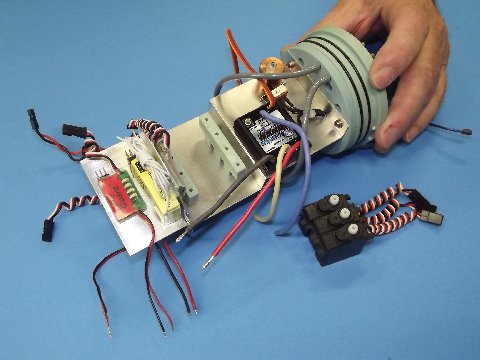
Dumas universal coupler installation
A Dumas type 3/16″ bore universal coupler is made up to the spur gear output shaft projecting out through its watertight seal set within the motor-bulkhead. The forward dog-bone half of the intermediate drive shaft engages this coupler.
The only customer installed device that fits to the bottom of the aluminum device tray is the 5-volt, 5-ampere BEC. 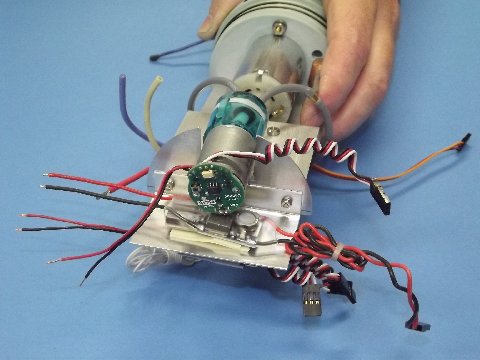 As with the other devices (other than the servos), it attaches with the aid of double-sided adhesive tape, or ‘servo-tape’ if packaged for sale at the hobby shop – you can buy more of the tape, at half the price, from the local, well-stocked Walmart! De-grease the metals surface, as well as the contact surfaces of the devices, with a quick swipe of a lacquer thinner dipped lint-free cloth – this will greatly enhance the sticking power of the mounting tape.
As with the other devices (other than the servos), it attaches with the aid of double-sided adhesive tape, or ‘servo-tape’ if packaged for sale at the hobby shop – you can buy more of the tape, at half the price, from the local, well-stocked Walmart! De-grease the metals surface, as well as the contact surfaces of the devices, with a quick swipe of a lacquer thinner dipped lint-free cloth – this will greatly enhance the sticking power of the mounting tape.
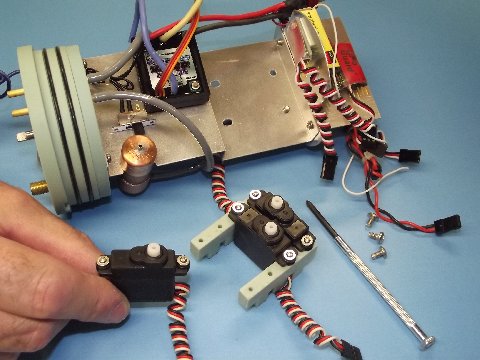
Mini-servos removed from the tray
The preferred means of securing your three mini sized servos to the resin servo rails is to remove the servo rails from the aluminum device tray and mount the three servos, as seen right. Once the servos are on the rails with the provided mounting hardware, make up the rails to the device tray, run in the rail mounting screws from the bottom of the tray, tighten them and you’re done.
 Not all ‘mini’ sized servos have the same length and height. So, built into the space on the aluminum device tray where the servos sit, we’ve provided enough room there to permit movement of the after railing forward or backward, enough to accommodate the size mini-servo you use. Use a file to extend the screw holes to get the re-installed servo rails to fit.
Not all ‘mini’ sized servos have the same length and height. So, built into the space on the aluminum device tray where the servos sit, we’ve provided enough room there to permit movement of the after railing forward or backward, enough to accommodate the size mini-servo you use. Use a file to extend the screw holes to get the re-installed servo rails to fit.
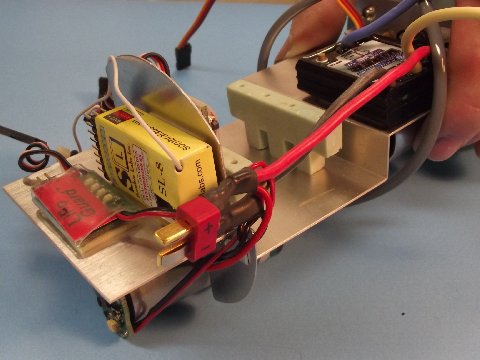
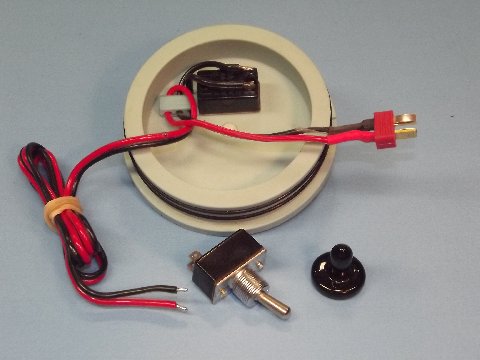 The large, 10-ampere, toggle-type mission switch is installed into the forward removable bulkhead, and secured in place by the clamping action of the watertight boot. A bead of RTV adhesive around the base of the boot and forward face of the bulkhead insures a watertight union between boot and bulkhead.
The large, 10-ampere, toggle-type mission switch is installed into the forward removable bulkhead, and secured in place by the clamping action of the watertight boot. A bead of RTV adhesive around the base of the boot and forward face of the bulkhead insures a watertight union between boot and bulkhead.
Note the position and use of the strain-relief block next to the installed switch body. Wire the switch in series with one of the power cable wires. The long end of the power cable runs from the forward dry space were the battery is, through the ballast tank conduit tube, and terminates into a Dean’s plug half within the after dry space. The short end of the power cable terminates into one-half of a Dean’s connector that makes up to the Lithium-polymer battery.
The strain-relief block is there to prevent any tugging of either side of the power cable from stressing and breaking the soldered wire from a switch body attachment lug.
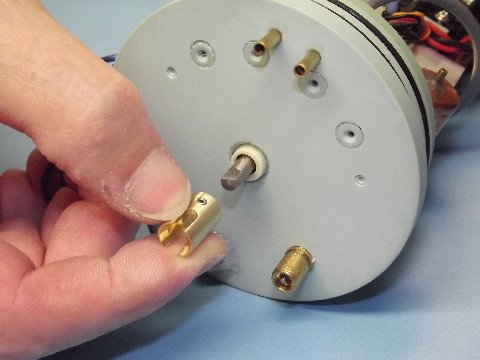
 Note how the provided SD servo push-rods are carefully bent to insure a smooth as possible passage through the push-rod seals set within the motor-bulkhead. This is an operation performed with care, and expenditure of time – not one to do if you’re all caffeine’d up!
Note how the provided SD servo push-rods are carefully bent to insure a smooth as possible passage through the push-rod seals set within the motor-bulkhead. This is an operation performed with care, and expenditure of time – not one to do if you’re all caffeine’d up!
The portions of a push-rod that will run through a watertight seal are polished, then coated with silicon grease (you’ll find this at the automotive supply store packaged as ‘distributor grease’). With the push-rods Z-bend end forward, run it, from the forward face of the motor-bulkhead through its push-rod seal. You’ll bend the Z-bend end of the push-rod as required till it meets the hole of the servo bellcrank.
See the open nipple atop the copper safety float-valve? That is the point of flooding should the induction line flood out and the safety float-valve not function properly. Later I’ll give you the run-down on how to maintain and preserve the SD and it’s many devices and mechanisms – maintenance steps that if adhered to, you’ll enjoy successful outings with your toy submarine for many seasons…or, if you don’t follow them, one day, soon, you will come home, crushed, with an empty boat stand under your arm!
R/C submarining is not a casual activity: much to do before, during and after the model hits the water.
Trackbacks:
patience, deep pockets required. There must be a simpler way to simplify this build.
Less expensive to purchase build WTC (using Taps Plastic) Verses purchasing WTC plus electronic hardware included, machining end caps, O-Rings.
Using vendors (e Bay) price saving.
Use YouTube for modeler’s submarine work.
Submarine vendors will drain your pocket cash purchasing their RC products.
Warning: using correct adhesives, resins(be careful, another adventure)
Good Luck
Been there done that.
Richard
Hi do you sell model sumarins kit. And how mucht do it cost.
Revard Dag Robert.
Dag Robert, check out the “Good to Know Links” for some web based sources for the Skipjack model kit. You will find the SubDriver website links embedded in the earlier Posts…
Regards, Robert